Russian ATC lesson 101 – the phantom SU25
The Russian Ministry of Defence has recently held a briefing that outlines ‘evidence’ of an SU25 shooting down MH17.
This is one version available on Youtube.
The evidence is based on a recording of an Air Situation Display from a Russian Air traffic management system. In the following paragraphs I will attempt to explain why this evidence is nothing more than an attempt to convince the layman with no ATM system knowledge into believing what they want you to believe, when with just some basic ATM system knowledge one can immediately see that there is no other phantom aircraft in the area at the time as they try to describe.
Air traffic management systems from the 1990s onwards have moved towards automated and computerised approaches to Air Traffic Management. Russian systems are no exception to this trend. Their civil ATM system in fact has adopted EUROCONTROL recommendations on architecture and what is known as the Human Machine Interface (which includes common elements of the graphical user interface) As the company responsible for Russian Civil ATM states:
In the 1990`s The Unified Series of SINTEZ automated ATC systems of the highest automation level was developed (MONA, SNET, MTCD), meeting EUROCONTROL recommendations and providing stripless ATC technology.
Stripless technology revolves around the concept of displaying flight plan information on an Air situation display rather than on a ‘strip’ of paper as was the method previously. An air situation display (ASD) is what you are looking at in the above Youtube clip
This means that information displayed on the ASD is common to most ATM systems seen in use around the world today by 1st world countries
The common elements, which are necessary for an Air traffic controller to do his or her job are:
- Callsign
- Aicraft Type
- Speed
- Cleared Flight Level or CFL (the level assigned to the pilot by the controller)Pilot reported or Mode C Radar derived current Flight level, or PRL (where differnt to CFL it nominally displays next to the CFL for comparison sake)
additional info often displayed includes:
- Velocity vector (a line that leads forward of the ‘paint’ to indicate projected travel based on a nominated timeframe often 1 or 2 minutes
-History dots – an indication of the previous paints of where the aircraft has been in this case about 4 paints are shown in history dots.
Primary Surveillance Radar (PSR), Secondary Surveillance Radar (SSR) and Flight Plans
ATM systems integrate data from multiple sources to provide the above listed information.
Primary radar refers to the ‘classic’ definition of radar where high energy beams are bounced off an object and create a return on the receiver. This radar mode is forced interrogation and requires no complicity or contribution from the object being interrogated. bearing/range and therefore Velocity, Height and some base knowledge of size and shape can be derived from PSR depending on the capability of the system itself. Primary radar is expensive and relatively short range but the value in it is the ability to see what doesn’t want to be seen.
Secondary Surveillance Radar relies on the aircraft providing some information voluntarily to the radar receiver through the use of a transponder located on the aircraft
This includes:
Display of a descrete Code that the aircraft is squawking typically this is a 4 digit number
Aircraft Height and velocity data
Flight Plans
All ATM systems require Flight plan information to provide effective information to allow ATC to occur. It is the flight plan information that allows PSR and more importantly SSR data to be ‘coupled‘ to more information about the aircraft. The callsign, the aircraft type and the cleared flight level is all information that is contained in the flight plan, in addition to route information, navigation capability and so on. The squawk code that the aircraft should be transmitting is also listed in the flight plan. By correlating the squawk code in the FPL with the actual Code being received by a transponder the ATM system can couple the 2 sources of data together to provide the complete data block you see in the attached images and in the full video briefing.
Primary and Secondary Surveillance radars are 2 completely different systems and sources of data, while Flight plan tracks are a theoretical representation of an aircraft location. An ATM system can display either or allsources of data, but when the data matches or correlates it will display a coupled or combined version of the data.
When an ATM system is dealing with multiple data sources or layers of information it has a priority of display.
A PSR with no other information = a circle. it may also have height data and velocity information displayed.
An SSR paint = a circle but also shows the code (because the transponder is squawking to the radar) and commonly the Flight Level
An SSR paint that is at the same location as a PSR paint and also matches a flight plan is also a circle but it has callsign data, aircraft type etc attached to it, ie it is coupled.
A FPL track that doesnt match a radar paint is a square – it is not attached to any radar data but is instead a representation of the likely position of an aircraft based on its speed and estimates for waypoints.
The other track in the top half of the image above is an SSR return with no flight plan coupled to it. Therefore one can only see the squawk code that particular transponder has been set to and the radar data on location, height and velocity. If a Flight plan existed with the same squawk code, and it was expected in the same place at that time (within a system tolerance) as per that flight plan then it would couple the data from the FPL to the SSR track
Conversely, when there is no radar return but an aircraft has flight planned to be at a certain point at a certain time, a square shape will appear on the situation display to indicate this. Where no radar coverage exists this is how ATC ‘procedurally’ control aircraft they can’t actually see.
This concept of coupled data is important in the misdirection that the Russian Ministry of Defence is attempting to acheive because what can be coupled can also be uncoupled and this is what we end up seeing in the case of MH17 in the video they provide.
In the above image one can see the MH17 Flight Plan track (a square) with a circle immediately next to it.
This occurs at 11:10 in the youtube clip.
What the RU MOD is saying is that the square is MH17 and the Circle is a NEW aircraft.
This is quite simply incorrect. The square is the theoretical position of MH17 now that its SSR has ceased to function and squawk its assigned code due to catastrophic failure.
It has uncoupled from the radar track and all that is left is a primary radar paint of MH17’s wreckage.
The RU MOD would like the layman to believe that the appearance of that little circle where MH17 was is the sudden appearance of a military jet (who would not squawk a code for SSR for reasons of concealment logically). The reality is that their automated ATM system is just like that of most modern countries and the circle is merely the remains of MH17’s Primary radar paint as it falls out of the sky, while the square is the expected position of MH17 based on what the ATC know of it.
There a couple of reasons why that paint exists on the ASD for an extended period of time
The first is that radar paints usually have a ‘coast’ time included in them. This means that when the data is incomplete or has just recently dissapeared, the radar paint will ‘coast’ on the ASD to allow the controller to see the last known location of the paint for a bit longer.
Furthermore, many ATM systems allow the controller to optionally select the ‘last’ paint and display it indefinitely. It can usually be toggled off or on to aid in situational awareness.
So, in dot point format;
- The video RU MOD provided was of the unified (ie civilian) traffic control system.
- That system conforms to most current computerised ATM systems found in EU, US, AU and many Asian countries.
- The display of MH17 (and others ) on the video is that of PSR and SSR data coupled with Flight Plan (FPL) data
- The coupling process fails at the time of the missile strike, as evidenced by the appearance of a square. Logically, the result of catastrophic system failure on the aircraft is that the transponder fails to squawk the required code anymore, forcing a decouple.
- What is left once the FPL decouples and the SSR data is gone due to transponder failure is the Primary Surveillance radar paint of MH17. This paint is co-located with the square from the Flight Plan, they diverge as the projected FPL position of MH17 moves away based on expected normal speed of a B777, from its actual (damage and falling wreckage) location as per the PSR
- The radar paint that the RU MOD tries to describe as the phantom SU25 is in fact the MH17 primary paint of what is now falling wreckageHopefully this is useful for those that really want to know what is going on in this press briefing by the Russians. It’s a good example of the desperate attempts this regime is willing to go to in an effort to confuse the events on this fateful day. As someone with experience in this field I felt an obligation to explain to others what they are seeing when the RU MOD try to invent a narrative based on a lack of understanding of a very complex system.


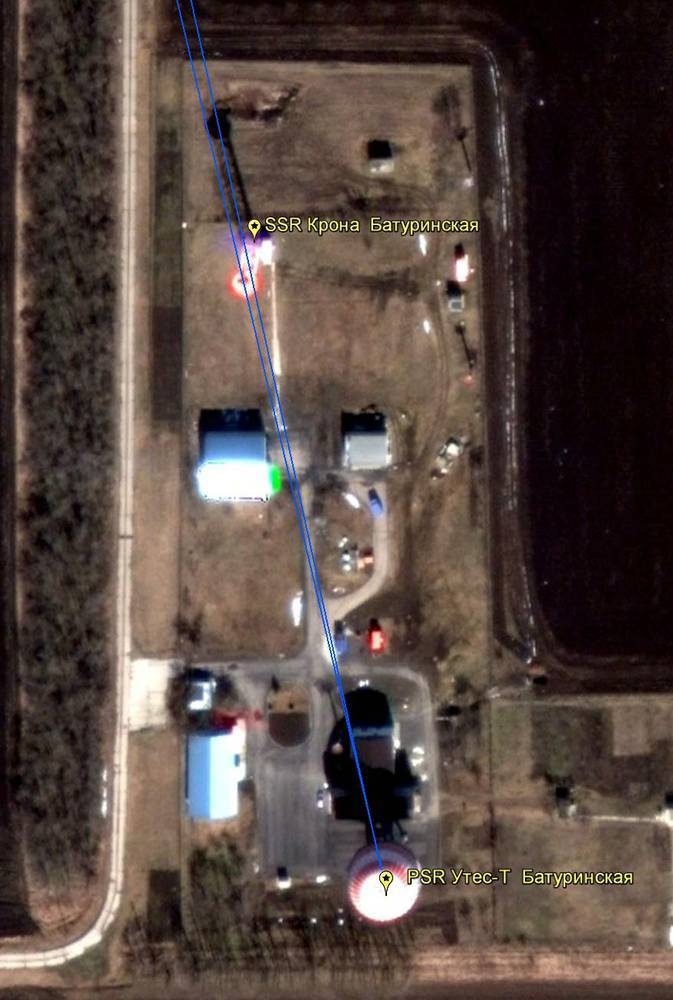
В прямоугольной рамке на дисплее диспетчера высвечиваются:
- номер рейса - КСА (комплекс средств автоматизации) пункта УВД привязывает к отметке цели
- модель самолета - КСА (комплекс средств автоматизации) пункта УВД привязывает к отметке цели
- эшелон - постоянно приходит от RBS ответчика самолета на вторичные радары (SSR)
- скорость - вычисляет - КСА (комплекс средств автоматизации) пункта УВДРядом с отметкой цели высвечиваются:
- прямая линия "вектор путевой скорости" - вычисляет КСА (комплекс средств автоматизации) пункта УВД
- точки на месте предыдущих позиций цели - вычисляет КСА (комплекс средств автоматизации) пункта УВД
АПОИ Приор - Руководство по эксплуатации
1) Получена информация об отметке первичного или вторичного каналов.
2) Если отметка не "подходит" ни для одной из регулярных трасс, т.е. не попадает ни в один из имеющихся пространственно-временных стробов регулярных трасс, то она используется для попытки автозахвата траектории.
Вокруг одиночной отметки образуется кольцевая зона первичного захвата. Если на следующем обзоре в зону первичного захвата попадает одна или несколько отметок, то каждая из них принимается за возможное продолжение новой траектории.
По координатам двух связанных отметок путем экстраполяции строятся новые зоны связи, а отметки, попавшие в эти зоны в следующем (третьем) обзоре, привязываются к соответствующим траекториям. Операции, выполняемые в процессе автозахвата, сводятся к экстраполяции координат и стробированию отметок. Экстраполяция координат производится в соответствии с гипотезой о «почти» равномерном и прямолинейном движении цели, т.е. допускаются некоторые небольшие радиальные и тангенциальные ускорения. Это обусловлено тем, что при автозахвате нет достаточной информации для выявления маневра. Зоны связи автозахвата имеют простейшую форму в виде областей, ограниченных азимутом и дальностью начала и конца. В случае успешного автозахвата траектории она передается потребителю и отображается на экране.
3) Если отметка "подходит" для одной из трасс, то она ассоциируется с трассой и используется для вычисления координаты следующей отметки траектории. Отметка в очередном обзоре определяется по предыдущему сглаженному значению и результатам последнего наблюдения, полученным от ПРЛ и/или ВРЛ. Сглаживание производится по известному из математической статистики методу средневзвешенных. Если к трассе ассоциирован только плот ВРЛ, то трасса получает его бортовой номер и высоту. Если к трассе ассоциирован только плот ПРЛ, то трасса не имеет значений бортового номера (БН) и высоты полета (Н) и передается потребителю с соответствующими признаками.
В случае отсутствия дополнительной информации ВРЛ потребителю передаются признаки, указывающие на отсутствие номера или высоты. Если отметка получена только по ПРЛ, то передается признак PSR, если отметка получена только по ВРЛ, то SSR, если ПРЛ и ВРЛ, то СМВ. В случае отсутствия ассоциированных для трассы плотов в течение трех последовательных обзоров происходит срыв трассы.
В случае одного или двух пропусков подряд сопровождение производится путем экстраполяции, но при этом передача экстраполированных отметок потребителю не производится.
Неподтвержденную отметку легко заметить на экране - она отображается менее ярким цветом.



 на международную
на международную